بهینه سازی انرژی در نیروگاه های بادی متصل به شبکه قدرت
به قلم: میثم سعیدی راد
یادداشت شماره 3
این پژوهش در مورد ژنراتور سنکرون با پل دیودی قدرت دو وجهی با ارتباط متناوب برای ثانویه و سیستم بکاربرده شده طرح میشود و انالیزی بر روی بردار یک موتور سنکرون با تامین دو وجهی سنکرون، برای جبران انرژی تولیدی در شبکه با موتور سرعت تعویضی استفاده خواهد شد، بکار خواهد رفت.بعد از ابراز معادلات کاربردی و تثبیت مشتقات مورد توجیهی، یک نمونه که نماد کنترل جداگانه انرژی مثبت و مثبت تر، در موتور سنکرون می باشد،در محیط Matlab-Simulinkنتایج آن بدست امده است. نمونه پیشنهادی ما از ازمایش کل شار چرخنده الکترو مغناطیسی ثانویه، جهت انالیز پل دیودی در قسمت اولیه و سیستم استفاده شده
مقدمه
پیشرفت شگرف در زمینه توسعه توربین های بادی جهت تولید برق از سال ١٩٧٥ شروع شد . حدود سال ١٩٨٠ اولین توربین مدرن به شبکه متصل گردید. با گسترش استفاده از انرژی باد و تولید برق بادی ، توربین های بادی متصل به ژنراتور القایی با تغذیه دوگانه یا DFIG (Double Fed Induction Generator) به طور گسترده ای به کار گرفته می شوند . این ژنراتور ها به دلیل ویژگی که در کارکرد با سرعت های متغیر باد دارند ، مورد توجه ویژه قرار می گیرند.
استفاده از نیروگاه های بادی با سرعت متغیر مزایایی نسبت به نیروگاه های بادی با سرعت ثابت دارد . اگر چه نیروگاههای بادی با سرعت ثابت، می توانند مستقیما به شبکه متصل شوند ، اما دامنه وسیع تری از انرژی، توسط نیروگاه های بادی سرعت متغیر، پوشش داده می شود و استرس های مکانیکی کمتری دارد ، نویز صوتی هم در آنها کمتر است . امروزه با پیشرفت های پاورالکترونیک، دیگر کنترل همه سرعت ها ممکن و به صرفه شده است ، در این مقاله DFIG, با سرعت متغیر مورد توجه قرار گرفته است که ویژگی مهمی در کارکرد در سرعت های متغیر باد دارد[7].
عملکرد ژنراتور القایی در سرعت ثابت
در سیستم های تولید انرژی با سرعت ثابت اغلب از ژنراتورهای القای قفس سنجابی squirrel cage استفاده می شود که با اتصال مستقیم به شبکه وصل می شوند. به این سیستم ها Fixed Speed Wind Electric Conversion Systems یا به اختصار ، سیستم های سرعت ثابت (WECS) ، می گویند. در این حالت به منظور عملکرد در حداقل و حد اکثر سرعت های ممکن باد ، از روش تغییر دادن تعداد قطب های ماشین استفاده می کنند. مزایای این روش کنترلی صرفه جویی اقتصادی می باشد اما از آنجایی که پوشش کاملی در همه سرعت های باد وجود ندارد و نمی توان از تمام انرژی باد به نحو احسن استفاده کرد،
نمودار گشتاور سرعت ، پله ای می باشد ، به علاوه با وجود نوسانات در سرعت باد، ولتاژ و همچنین توان خروجی نوسانی می باشند[5,4].
از آنجاییکه روش کنترل توان راکتیو به صورت ذاتی در این روش وجود ندارد ، باید حتما از بانک خازنی استفاده گردد تا توان راکتیو لازم تامین شود.
ناگفته نماند که از کنترل زاویه پیچش و کنترل گام نیز، در پره های توربین استفاده می شود که به منظور کنترل سرعت روتور در بازه های بین دو پله از تغییر تعداد قطب ها می باشد.
عملکرد ژنراتور القایی در سرعت متغیر
در توربین های سیستم های با سرعت متغیر در واقع قسمت دوار توربین نوسانات توان مکانیکی باد را با تغییر سرعت خود جذب می کند و منحنی توان خروجی صاف تر است ، این امر به بهبود کیفیت توان کمک می کند، اما از آنجاییکه سرعت متغیر تولید فرکانس های متغیر ولتاژ می کند ، جهت تثبیت فرکانس باید از کانورتر پاور الکترونیک استفاده کرد. در ادامه عملکرد سرعت متغیر برای دو نوع ژنراتور القایی قفس سنجابی و روتور سیم پیچی شده مورد بررسی قرار می گیرد.
3-1 - ژنراتور قفس سنجابی تحت سرعت متغیر
در این مدل ،کانورتر پل back to back ، بین شبکه و ژنراتور به صورت سری متصل است . در نتیجه کانورتر باید متناسب با قدرت ژنراتور طراحی و ساخته شود، زیرا باید بتواند تمام توان استاتور را از خود عبور دهد . در نتیجه محدودیت موجود در این روش، هزینه ی کانورتر است.
در شکل 1 نحوه اتصال ژنراتور قفس سنجابی در عملکرد سرعت متغیر باد نشان داده شده است. مزایای این روش ، توانایی در استفاده بهینه از قدرت باد و محدود کردن نیاز به استفاده از بانک خازنی می باشد و از معایب آن بالا بودن هزینه کانورتر با توجه به ریتینگ آن می باشد .
3-2 – ژنراتور روتور سیم پیچی شده تحت سرعت متغیر
با استفاده از ژنراتور القایی دارای روتور سیم پیچی شده دیگر نیازی به پرداخت هزینه بالا جهت ساخت یا خرید کانورتر نمی باشد زیرا در این روش کانورتر تنها بین روتور و شبکه متصل می شود و تنها لازم است توان لغزش را تحمل کند. اما هزینه خود ژنراتور القایی روتور سیم پیچی شده بیشتر است، ولی به طور کلی در توان های بالا هزینه دو سیستم قابل مقایسه می شود و در مجموع مزایای استفاده از ژنراتور روتور سیم بندی شده با توجه به کیفیت کنترلی که روی توان دارد، بیشتر از ژنراتور قفس سنجابی می باشد.
در شکل 2 نحوه اتصال ژنراتور القایی روتور سیم پیچی شده با تغذیه دوگانه را در اتصال به شبکه مشاهده می کنید.
مدل ژنراتور القایی DFIG
همانند موتور القایی ، ژنراتور القایی دارای عملکرد در سرعت زیر سنکرون و فوق سنکرون می باشد که در مجموع چهار حالت کاری را برای ماشین القایی رقم می زند. در تولید برق بادی دو حالت ژنراتوری فوق سنکرون و زیر سنکرون مورد نظر و بررسی قرار دارد . از این رو دو کانورتر قدرت پل back to back توسط یک لینک DC ، می تواند شارش توان را در دو جهت در روتور یک DFIG ، فراهم کند[6,8,3]. وظیفه ی کانورتر سمت شبکه ثابت نگه داشتن ولتاژ لینک DC است و وظیفه ی کانورتر سمت روتور ، کنترل توان اکتیو و راکتیو در استاتور می باشد.
همان طور که در شکل3 مشاهده می کنید پل کانورتری در هر فاز یک پایه و در مجموع سه پایه دارد و هر پایه شامل 2 ترانزیستور می باشد. یک کنترل هیسترزیس مقادیر مطلوب جریان های فاز روتور را توسط روشن کردن ترانزیستور فوقانی در هنگامی که مقدار جریان فاز ، از جمع جبری جریان واقعی فاز و سطح مشخص شده ی هیسترزیس بیشتر است، کنترل می کند. همچنین این کنترل، ترانزیستور پایینی را در هنگامیکه مقدار واقعی جریان، بیشتر از جمع جبری سطح هیسترزیس و مقدار جریان پایه است ، روشن می کند.روشن کردن ترانزیستور بالایی در هر فاز، موجب افزایش جریان در آن فاز می شود و روشن شدن ترانزیستور پایینی در هر فاز از میزان جریان در آن فاز می کاهد . بدیهی است که در هر زمان تنها یکی از دو ترانزیستور می تواند روشن باشد.
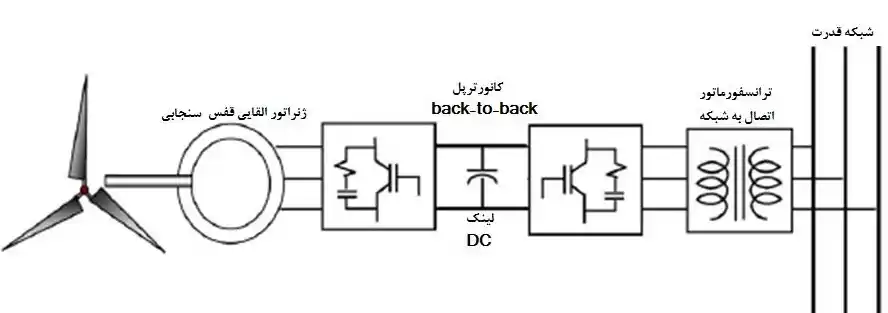
شکل 1: اتصال ژنراتور القایی قفس سنجابی به شبکه در عملکرد سرعت متغیر
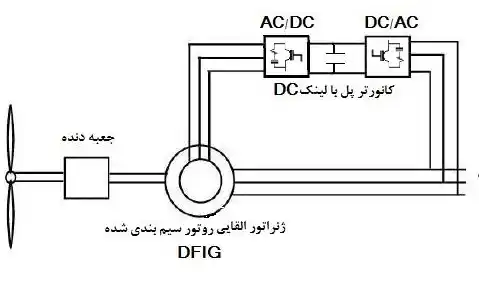
شکل 2: اتصال ژنراتور القایی روتور سیم بندی شده به شبکه به صورت DFIGدر عملکرد سرعت متغیر
کنترل کانورتر سمت روتور
فرایند کنترل این حقیقت را به کار می بندد که در قاب مرجع استاتور، تغییرات جریان روتور در تغییرات جریان استاتور منعکس می شودو از این رو با کنترل جریان روتور، توان های اکتیو و راکتیو استاتور قابل کنترل است.
روتور در دستگاه مرجع شار گردان استاتور است .این عمل دستیابی به مقادیر مطلوب سرعت و گشتاور را مطابق منحنی سرعت گشتاور بهینه نتیجه خواهد داد ، با این شیوه ، با یک ضریب توان مطلوب ، می توان ست پوینت توان اکتیو را نیز از روی ست پوینت توان اکتیو محاسبه کرد .برای بهره گیری از مزایای سرعت متغیر، پیگیری جدول گشتاور سرعت بهینه ، ضروری است . توسط کنترل گشتاور می توان سرعت را در مقدار مطلوب تثبیت کرد . یک روش، تنظیم ست پوینت توان اکتیو از روی مقادیر لحظه ای سرعت روتور و کنترل کردن جریان iry
نشان داده خواهد شد که در کنترل شار گردان استاتور ، همه ی کمیت های روتور و استاتور به یک قاب مرجع خاص ارجاع داده می شوند که تحت یک فرکانس زاویه ای برابر با فازور فضایی شار پیوندی می چرخد و محور x در این دستگاه مرجع گردان ، منطبق بر بردار شار استاتور ،فیکس شده است . در حالت دایمی سرعت این قاب مرجع گردان برابر سرعت سنکرون می باشد[2].